#include <RosCartesianTaskProxy.h>
|
| | RosCartesianTaskProxy (const std::string &robot_name, const std::string &controller_name, const std::string &task_name) |
| |
| virtual | ~RosCartesianTaskProxy () |
| |
| std::shared_ptr< orca_ros::common::RosCartesianAccelerationPIDProxy > | servoController () |
| |
| void | setDesired (const orca::math::Vector6d &cartesian_acceleration_des) |
| |
| void | setBaseFrame (const std::string &base_ref_frame) |
| |
| void | setControlFrame (const std::string &control_frame) |
| |
| std::string | getBaseFrame () |
| |
| std::string | getControlFrame () |
| |
| void | setDesired (const Eigen::Matrix4d &des_pose, const orca::math::Vector6d &des_vel, const orca::math::Vector6d &des_acc) |
| |
| void | setDesiredPose (const Eigen::Matrix4d &des_pose) |
| |
| void | setDesiredVelocity (const orca::math::Vector6d &des_vel) |
| |
| void | setDesiredAcceleration (const orca::math::Vector6d &des_acc) |
| |
| const Eigen::Matrix4d & | getDesiredPose () |
| |
| const orca::math::Vector6d & | getDesiredVelocity () |
| |
| const orca::math::Vector6d & | getDesiredAcceleration () |
| |
| const Eigen::Matrix4d & | getCurrentPose () |
| |
| const orca::math::Vector6d & | getCurrentVelocity () |
| |
| | RosGenericTaskProxy (const std::string &robot_name, const std::string &controller_name, const std::string &task_name) |
| |
| virtual | ~RosGenericTaskProxy () |
| |
| double | getWeight () |
| |
| void | setWeight (double weight) |
| |
| orca::math::Size | getSize () |
| |
| int | cols () |
| |
| int | rows () |
| |
| Eigen::MatrixXd | getE () |
| |
| Eigen::VectorXd | getf () |
| |
| virtual void | print () |
| |
| void | setE (const Eigen::MatrixXd &E) |
| |
| void | setf (const Eigen::VectorXd &f) |
| |
| | RosTaskBaseProxy (const std::string &robot_name, const std::string &controller_name, const std::string &task_name, const std::string &generic_prefix) |
| |
| virtual | ~RosTaskBaseProxy () |
| |
| bool | isActivated () |
| |
| const std::string & | getName () |
| |
| bool | activate () |
| |
| bool | deactivate () |
| |
| void | print () |
| |
| orca::common::TaskBase::State | getState () |
| |
| void | setRampDuration (double ramp_time) |
| |
| double | getRampDuration () |
| |
| | RosWrapperBase (const std::string &robot_name, const std::string &controller_name="", const std::string &obj_name="", const std::string &generic_prefix="") |
| |
| virtual | ~RosWrapperBase () |
| |
| std::string | getRobotName () |
| |
| std::string | getControllerName () |
| |
| std::string | getGenericPrefix () |
| |
| std::string | getObjectName () |
| |
| std::shared_ptr< ros::NodeHandle > | getNodeHandle () |
| |
| std::string | getNamespacePrefix () |
| |
| std::string | getRobotNamespacePrefix () |
| |
| RosCartesianTaskProxy::RosCartesianTaskProxy |
( |
const std::string & |
robot_name, |
|
|
const std::string & |
controller_name, |
|
|
const std::string & |
task_name |
|
) |
| |
| RosCartesianTaskProxy::~RosCartesianTaskProxy |
( |
| ) |
|
|
virtual |
| std::string RosCartesianTaskProxy::getBaseFrame |
( |
| ) |
|
| std::string RosCartesianTaskProxy::getControlFrame |
( |
| ) |
|
| const Eigen::Matrix4d & RosCartesianTaskProxy::getCurrentPose |
( |
| ) |
|
| const orca::math::Vector6d & RosCartesianTaskProxy::getCurrentVelocity |
( |
| ) |
|
| const orca::math::Vector6d & RosCartesianTaskProxy::getDesiredAcceleration |
( |
| ) |
|
| const Eigen::Matrix4d & RosCartesianTaskProxy::getDesiredPose |
( |
| ) |
|
| const orca::math::Vector6d & RosCartesianTaskProxy::getDesiredVelocity |
( |
| ) |
|
| void RosCartesianTaskProxy::setBaseFrame |
( |
const std::string & |
base_ref_frame | ) |
|
| void RosCartesianTaskProxy::setControlFrame |
( |
const std::string & |
control_frame | ) |
|
| void RosCartesianTaskProxy::setDesired |
( |
const orca::math::Vector6d & |
cartesian_acceleration_des | ) |
|
| void RosCartesianTaskProxy::setDesired |
( |
const Eigen::Matrix4d & |
des_pose, |
|
|
const orca::math::Vector6d & |
des_vel, |
|
|
const orca::math::Vector6d & |
des_acc |
|
) |
| |
| void RosCartesianTaskProxy::setDesiredAcceleration |
( |
const orca::math::Vector6d & |
des_acc | ) |
|
| void RosCartesianTaskProxy::setDesiredPose |
( |
const Eigen::Matrix4d & |
des_pose | ) |
|
| void RosCartesianTaskProxy::setDesiredVelocity |
( |
const orca::math::Vector6d & |
des_vel | ) |
|
The documentation for this class was generated from the following files:
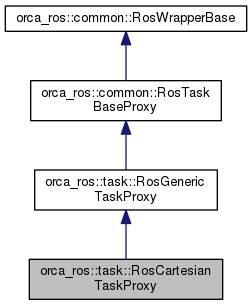
 Inheritance diagram for orca_ros::task::RosCartesianTaskProxy:
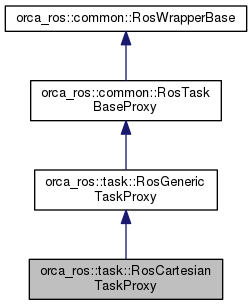
Inheritance diagram for orca_ros::task::RosCartesianTaskProxy: 1.8.11
1.8.11