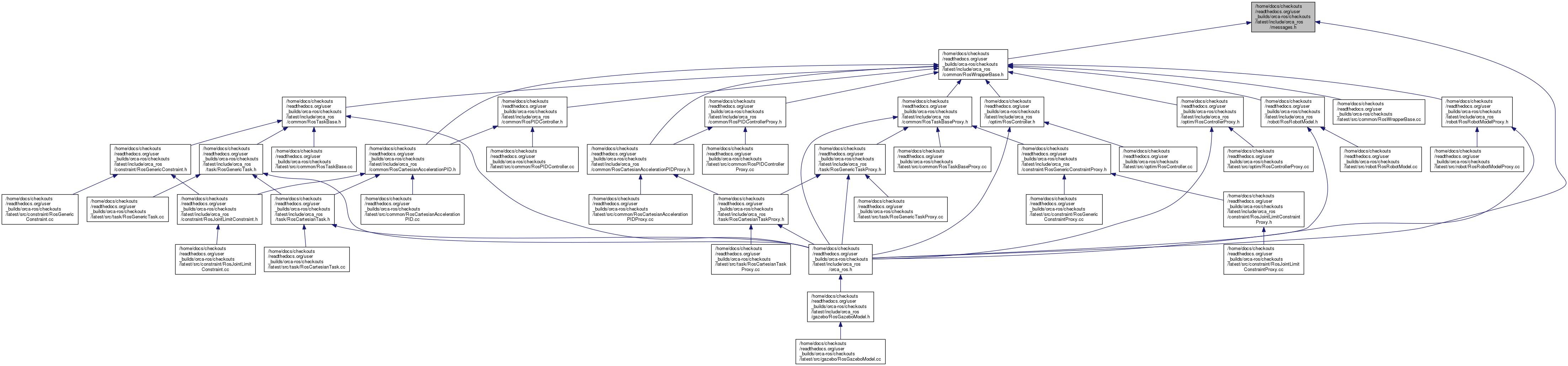
#include <orca_ros/RobotState.h>#include <orca_ros/JointTorqueCommand.h>#include <orca_ros/TaskDescription.h>#include <orca_ros/ConstraintDescription.h>#include <orca_ros/CartesianTaskState.h>#include <sensor_msgs/JointState.h> Include dependency graph for messages.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for messages.h: This graph shows which files directly or indirectly include this file: 1.8.11
1.8.11